76 February 1994 Hewlett-Packard Journal
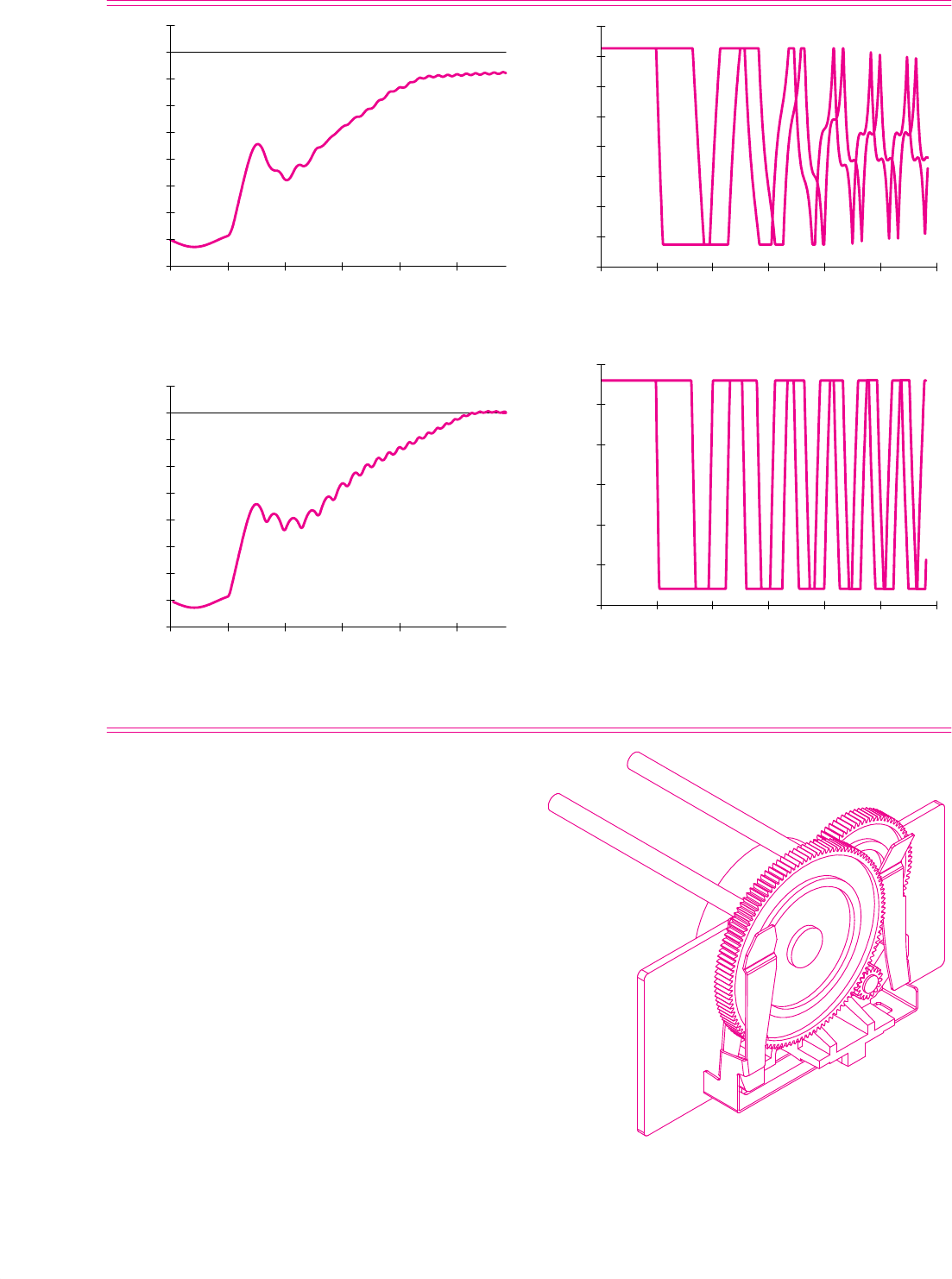
Fig. 2. Simulated velocity profile of a failing motor (8-ohm).
–200
0
200
400
600
800
1000
1200
1400
1600
Velocity (steps/s)
0 0.005 0.01 0.015 0.02 0.025
Time (seconds)
Fig. 3. Simulated velocity profile of a good (2-ohm) motor.
–200
0
200
400
600
800
1000
1200
1400
1600
Velocity (steps/s)
0 0.005 0.01 0.015 0.02 0.025
Time (seconds)
Fig. 4. Simulated currents in a failing motor.
–0.8
–0.6
–0.4
–0.2
0
0.2
0.4
Current (amperes)
0 5 10 15 20 25
Time (ms)
30
0.6
0.8
Fig. 5. Simulated currents in a stable, running stepper motor.
–1.5
–1
–0.5
0
0.5
1
1.5
Current (amperes)
0 5 10 15 20 25
Time (ms)
30
start through high speed and back down to a stop (see
“Stepper Motor Simulation Model” on page 75). This model
includes the motor, system inertia, inductance, motor resis-
tance, and friction. It also dynamically calculates back-
EMFs and motor currents.
This simulation predicted that a motor with a resistance of
one or two ohms could run significantly faster than previous
DeskJet motors. Speeds of 2000 full steps per second (2500
r/min) were predicted as possible high-end speeds where
older permanent magnet motors had not been run much
faster then 600 to 1000 steps per second.
A motor vendor was located that would be willing to wind
the motor coils with a heavy-gauge wire and prototype
motors were assembled. These motors performed at the
predicted speeds and astounded the motor R&D engineers
themselves! They previously had not built permanent mag-
net steppers with this kind of speed capability. This vendor
developed manufacturing processes to produce these low-
resistance coils in production and ultimately won the con-
tract to provide HP with these motors for the Deskjet 1200C
printer.
Fig. 5 shows the complete motor, gears, and backlash system.
Fig. 5. The complete motor, gears, and backlash system.








